Das unser Planet zu einem Großteil von Wasser bedeckt ist, weiß wahrscheinlich fast jeder. Genau gesagt sind es 71% der Erdoberfläche, die von den Weltmeeren und ihren Nebengewässern eingenommen werden. Die feste Oberfläche der Kontinente macht somit also gerade einmal 29% aus. Ziemlich wenig im Verhältnis zur riesigen Wasseroberfläche, die unserer Erde ihren Beinamen gegeben hat: Der blaue Planet.
Dieser blaue Planet ist an Land so gut erforscht, dass wir mittlerweile praktisch jeden Quadratzentimeter kennen, kartografiert haben und unter fast jedem ungewöhnlichen Stein einmal jemand nachgesehen hat, was sich darunter verbirgt. Den bei weitem größten Teil unseres Planeten haben wir dabei allerdings außer Acht gelassen, denn gerade einmal 5% der Weltmeere sind gut erkundet. Von diesem geringen Anteil entfällt wiederum der Löwenanteil auf die seichten Zonen des Meeres. Über die tieferen Bereiche wissen wir daher fast nichts! Selbst die Mondoberfläche ist aktuell besser erforscht als die Tiefsee.
Wo genau die Tiefsee beginnt, ist bis heute nicht einmal eindeutig definiert. Die einen Wissenschaftler sagen, dass die Tiefsee bei etwa 200m beginnt, weil ab dieser Wassertiefe aufgrund des Lichtmangels keine Photosynthese mehr stattfinden kann, andere sind der Meinung sie beginnt bei ca. 800m, weil es ab hier wirklich stockfinster ist und wiederum andere meinen: „Roundabout 4000m“
Alles in allem weiß also keiner so richtig Bescheid.
Mich hat dieser Umstand bereits als Kind fasziniert und ich habe Bücher und Dokus über die Tiefsee und ihre Geheimnisse geliebt. Besonders die Geschichte der Trieste fasziniert mich bis heute. Die Trieste ist ein U-Boot, mit dem am 23. Januar 1960 die beiden Forscher Don Walsh und Jacques Piccard bis in eine Tiefe von 10.910m unter dem Meeresspiegel hinab getaucht sind. Bis heute ist es nur ein weiteres Mal gelungen, einen Menschen dort runter zu bringen, als James Cameron am 26. März 2012 mit der Deepsea Challenger als dritter Mensch in einer Tiefe von 10.908m den Grund des Challengertiefs erreichte.
Immerhin hat sich aber in der Zwischenzeit trotzdem etwas getan, denn seit ein paar Jahrzehnten haben wir Menschen sogenannte ROVs und sie werden immer besser.
Ein ROV (Remotely Operated Vehicle) ist ein ferngesteuertes Unterwasserfahrzeug, welches unbemannt an einem Kabel hängend zur Erforschung der Unterwasserwelt oder für Arbeitszwecke eingesetzt wird.
Mit der Technik habe ich mich vor mittlerweile fast 20 Jahren mal eine Weile aus reiner Neugier befasst und auch ein paar Entwürfe für ein ROV gezeichnet. Bei Zeichnungen ist es allerdings immer geblieben. Ich hatte damals nie genau nachgerechnet und auch nicht ernsthaft in Erwägung gezogen, so ein Ding jemals zu bauen. Ich hatte schließlich gar kein Mutterschiff und auch keine Ahnung von der Seefahrt. Reine Träumerei war das. So wie andere Astronaut werden wollten, wollte ich mal Tiefseeforscher werden. Wobei, Astronaut wollte ich auch mal werden und Lokomotivführer und…
Naja, jedenfalls fiel mir 2014, kurz bevor wir mit Eos los sind, wieder ein, dass ich ja mal von einem ROV träumte. Also habe ich wieder gezeichnet und schließlich festgestellt: Zu teuer, zu kompliziert, zu wenig Zeit!
Das ganze geriet für Jahre wieder in Vergessenheit, bis ich nach der letzten Fahrt mit Morgenstern so langsam anfing wieder darüber nachzudenken. Ich habe gezeichnet, gerechnet, ein wenig kalkuliert und Sabrina schließlich vor einer Weile damit konfrontiert.
Denn immer wenn ich eine neue Idee habe, so ist Sabrina meine wichtigste Kritikerin und erdet mich, wenn ich mal übers Ziel hinaus schieße.
Beim ROV hat sie mich vor allem bei der Baugröße geerdet. Nicht viel größer als ein Schuhkarton soll das erste werden!
Ich hätte schon gerne gleich ein wenig größer gebaut, aber es macht natürlich absolut keinen Sinn bei soviel Neuland zu viel zu riskieren. Umso größer (und teurer) das Projekt, umso anfälliger und umso schmerzhafter wäre es bei einem Totalverlust. Und da ich mich bei diesem Projekt nur auf sehr wenig Erfahrungen anderer stützen kann, rechne ich fest mit Rückschlägen.
Meistens zeige ich meine Projekte ja erst wenn sie fertiggestellt sind, oder zumindest bereits gut funktionieren. Diesmal mache ich das etwas anders und nehme euch mit auf die Entstehungsreise. Heute zeige ich zumindest mal eine Skizze des derzeitigen Entwurfs:

Der Druckkörper selbst ist für eine maximale Tauchtiefe von 1982m berechnet, könnte allerdings mit der derzeitigen Frontscheibenkonfiguration nur bis maximal 397m verwendet werden, was zunächst mehr als ausreichend ist.
Für die ersten Versuche werde ich mit 100m Kabel arbeiten, was bereits eine Herausforderung darstellt. Das Kabel ist eines der teuersten und aufwändigsten Komponenten eines ROV. Es überträgt die Steuersignale vom Mutterschiff zum Roboter und das Videosignal vom Roboter zum Schiff. Dabei muss es flexibel und robust sein und ein ganz bestimmtes Auftriebsverhalten erfüllen.
Beim Thema Kabel wird sich der ein oder andere wahrscheinlich die Frage stellen: Und warum wird nicht per Funk gesteuert?
Ganz einfach: Wasser dämpft Radiowellen enorm gut. So gut, dass zum Beispiel ein 2,4Ghz Signal nach wenigen Zentimetern nicht mehr brauchbar ist.
Militärische U-Boote müssen deshalb zur umfangreichen Kommunikation auftauchen. Unter Wasser ist nur mit sehr viel Aufwand und viel Energie eine Datenübertragung möglich. Die nutzbare Bandbreite ist dabei extrem gering und die nachgeschleppten Antennen aufgrund der eingesetzten Längstwellen mehrere Hundert Meter lang. Funk scheidet deshalb für ein ROV aus und wir bleiben deshalb ganz klassich beim Kabel.
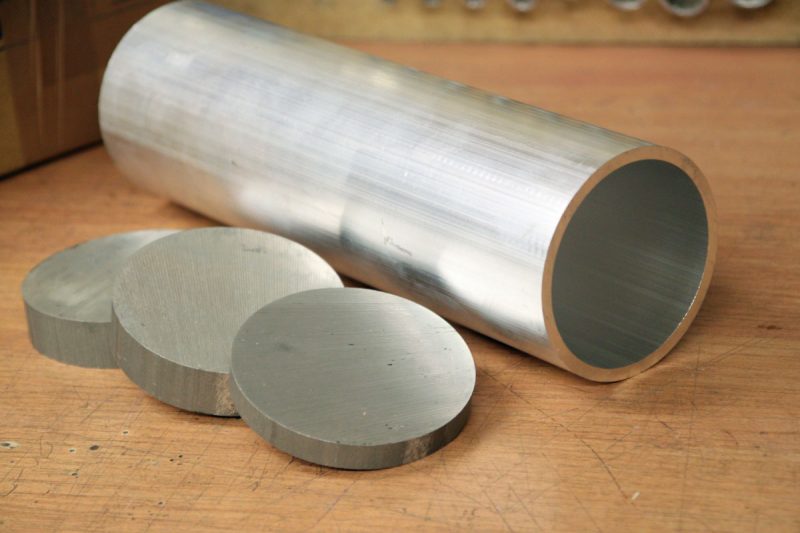
Und so sehen die ersten Rohteile aus, mit denen demnächst der Druckkörper gebaut wird: